LaseASTO
Area Surveillance Truck Operation

The EN ISO 13849 certified measuring system LaseASTO system automatically detects and classifies the truck and driver in a „Region of Interest - ROI“, i.e. a predefined area of interest. The system can detect, locate and continuously track the position of people in work areas, for example, when a container is being loaded or unloaded.
THE APPLICATION
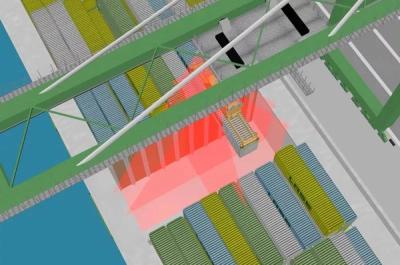
LaseASTO divides the work area into two monitoring areas: a danger and a safety zone. In the danger zone, the loading of containers takes place. If a person is in this area, an emergency shutdown of the crane system is carried out. If, on the other hand, the person is in the safety zone, container handling, for example, can be carried out safely.
At least two multi-layer laser scanners are used in this system, which are mounted, for example, on the container crane above the transfer area from the crane to the transfer area. These scan the transfer or “monitoring area”. The measured 3D point clouds, i.e. scan data from both sensors and produce a scenario representation in the monitoring area under the crane.
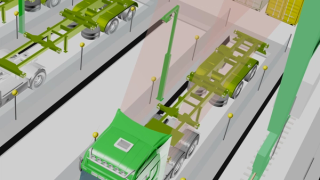
Segmentation of the obtained 3D point cloud provides the individual objects’ length, width and height. A truck or driver classification is based on size information and other attributes, such as the centre point and the number of points that make up the detected object.
Once the driver or other objects, for example, has been detected, they will be tracked by LaseASTO until they reach a safety zone within the monitoring area, return to the driver’s cab, or leave the area of operation. These evaluations are continuously transmitted to the crane driver, who uses this information to determine when loading or unloading a container is safe.
Alarms are not triggered if boxes or the like have already been detected in the work area. Only persons trigger an alarm here if they are not in the safe zone or if others enter the working area from outside.
THE FEATURES
- Monitoring of hazardous and safety areas
- Latest multilayer laser scanner technology
- Suitable for automated RMG, RTG and STS cranes
- Continuous personnel & machine tracking
- Alarm signal to assit crane operator or remote crane operator
- Direct connectable to crane automation
- It can be integrated into other LASE multilayer scanning applications as well
- EN ISO 13849 certified
Downloads
Product Inquiry
Do you have questions about the LaseASTO or would you like to receive a quote? Fill out the form and we will get back to you as soon as possible.